近年、高齢化社会に伴い、骨関連疾患の発生率が増加し、伝統的な整形外科手術の脆弱な患者の位置、手術器具の制御精度、医師の個人的な経験と疲労のレベルなどの要因の影響が手術の成功率に影響を与え、信頼性が高く、従来の手術とは対照的に、骨手術ロボットは自動的に実行できます。または、受動的な実行のコマンドの下で、医師の非武装ポジショニングの代わりに機械アームのポジショニング、安定性と精度が向上します。
臨床応用における手術ロボット ナビゲーション装置はますます広くなり、3 d 画像は手術ロボット ナビゲーション システムの実装の基礎であり、3 d 再構成の術中画像データを実現し、操作エラーを減らし、操作の要件に達しました。マップの位置と効果のテストの二重の役割を持ち、手術をより正確にし、手術の効果をより安全にします。
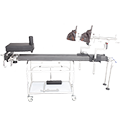
手術用ロボットと 3D C アームの両方が利用可能な場合でも、正常に手術を行うことはできません。手術台も装備する必要があり、手術台は手術ロボットと 3D C アームの両方のニーズを満たす必要があります。すべての手術台に手術用ロボットと 3D C アームを取り付けることができるわけではないため、最適な透視結果を得るには、Howell Medical 製の炭素繊維手術台が必要です。
次の写真を見てください。二重柱手術台、超遠望スペース、および脊椎手術用付属品を使用して、脊椎手術を完了することができます。下肢牽引およびその他の付属品も、要件に応じて使用して、より多くの外科的ニーズを満たすことができます。